Next level shroud manipulation in steel making plants
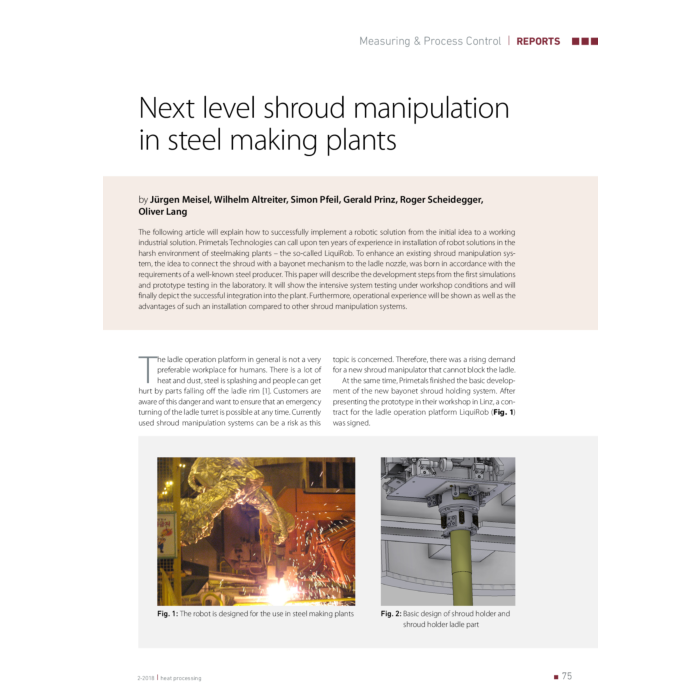
The following article will explain how to successfully implement a robotic solution from the initial idea to a working industrial solution. Primetals Technologies can call upon ten years of experience in installation of robot solutions in the harsh environment of steelmaking plants – the so-called LiquiRob. To enhance an existing shroud manipulation system, the idea to connect the shroud with a bayonet mechanism to the ladle nozzle, was born in accordance with the requirements of a well-known steel producer. This paper will describe the development steps from the first simulations and prototype testing in the laboratory. It will show the intensive system testing under workshop conditions and will finally depict the successful integration into the plant. Furthermore, operational experience will be shown as well as the advantages of such an installation compared to other shroud manipulation systems.
| Autoren | by Jürgen Meisel, Wilhelm Altreiter, Simon Pfeil, Gerald Prinz, Roger Scheidegger, Oliver Lang |
|---|---|
| Erscheinungsdatum | 01.02.2018 |
| Format | |
| Verlag | Vulkan-Verlag GmbH |
| Sprache | English |
| Titel | Next level shroud manipulation in steel making plants |
| Beschreibung | The following article will explain how to successfully implement a robotic solution from the initial idea to a working industrial solution. Primetals Technologies can call upon ten years of experience in installation of robot solutions in the harsh environment of steelmaking plants – the so-called LiquiRob. To enhance an existing shroud manipulation system, the idea to connect the shroud with a bayonet mechanism to the ladle nozzle, was born in accordance with the requirements of a well-known steel producer. This paper will describe the development steps from the first simulations and prototype testing in the laboratory. It will show the intensive system testing under workshop conditions and will finally depict the successful integration into the plant. Furthermore, operational experience will be shown as well as the advantages of such an installation compared to other shroud manipulation systems. |